Présentations
La robotique en IUT
Comment débuter, quelles bases ?
La robotique : Mythes et réalité
Conférence de 45 minutes sur les enjeux de la robotique
Ressources pour la robotique
Ressources for Kalman Filtering
Tutorial videos for understanding Kalman filters
An introduction to Deep Learning
Interesting tutorial videos
Programming ressources
Robot Vision using OpenCV in C# :
a C# sample project for connecting a USB camera to a computer and using OpenCV

Trajectory planning using minimum jerk algorithm
A high frequency timer in C# :
Win32 library for using precise high frequency timers

Ressources for implementing Ethernet communication with a microcontroller and for connecting Basler Ethernet cameras to a computer

Electronics ressources
Using ADXRS453 precision gyroscope
Implementing I2C and SPI sensors
Code Examples with a PIC microcontroller
A high frequency timer in C#
It is frequently necessary to have a high frequency timer in C# (more than 50 Hz). Especially in robots, frequencies around 100Hz are necessary for managing positionning task or real time operating systems task. However built in timers form System.TImers...
Ethernet for embedded and robot communication
L'utilisation des communications Ethernet dans les systèmes embarqués est particulièrement intéressante pour des raisons de débit, de fiabilité et compatibilité avec les stack TCP/IP et UDP. L'objectif de cette page est de donner l'accès aux clés permettant...
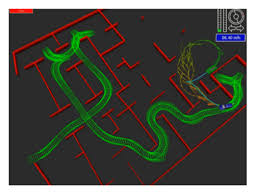
Robot Vision
Code de gestion d'une caméra sous Open CV en C# : Télécharger
Planification de trajectoire : ressources utiles
Quelques ressources utiles pour la planification de trajectoires. Minimum jerk trajectory : Article de Shadmehr Vidéo bien faite d'u mode de calcul matriciel des coefficients de la trajectoire
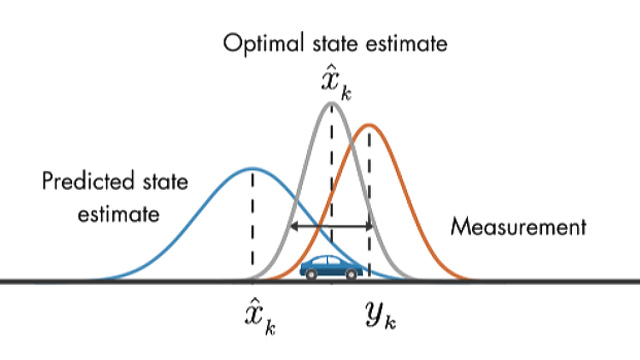
Kalman Filter : ressources pour les comprendre et les implanter
Quelques ressources pour comprendre et implanter les filtres de Kalman : Explications et concepts basiques mais clairs : https://www.kalmanfilter.net/alphabeta.html Tutorial Youtube 1 : Introduction et concepts Tutorial Youtube 2 : Implantation d'un filtre de...
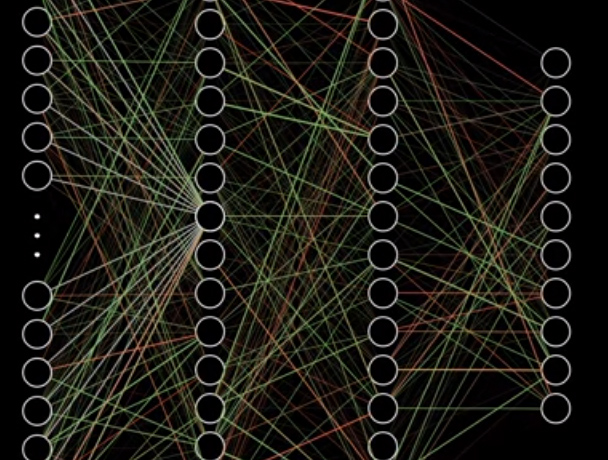
Deep Learning : quelques vidéos explicatives très bien faites
Excellente vidéo pour comprendre les enjeux du deep learning, en commençant par ceux des réseaux de neurones classiques : https://www.youtube.com/watch?v=aircAruvnKk Lien vers les cours de Stanford sur les réseaux de neurones convolutionnels utilisés pour la...
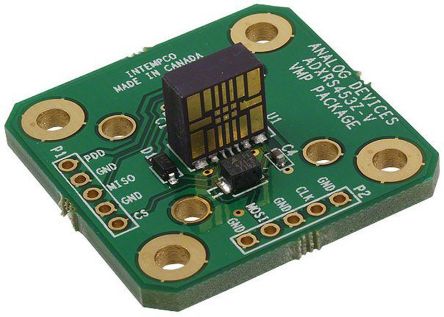
Comment utiliser le gyroscope ADXRS453
Utiliser le Gyroscope ADXRS453 Article réalisé par les étudiants de DUT GEII de l'IUT de Toulon Lien vers la datasheet du composant Information importante L'implémentation du gyroscope sur un projet existant s'effectuera grâce à la modification et à l'ajout de...
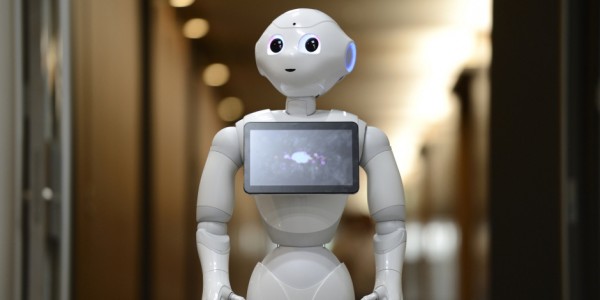
Conférence – La robotique : Mythes et réalités
Télécharger la présentation de la conférence : La robotique mythe et réalité Plan de la présentation La robotique : une évolution de plus dans l’histoire des sciences ? Entre l’amélioration de l’outil... La robotique : une extension de l’automatisation. … et la...
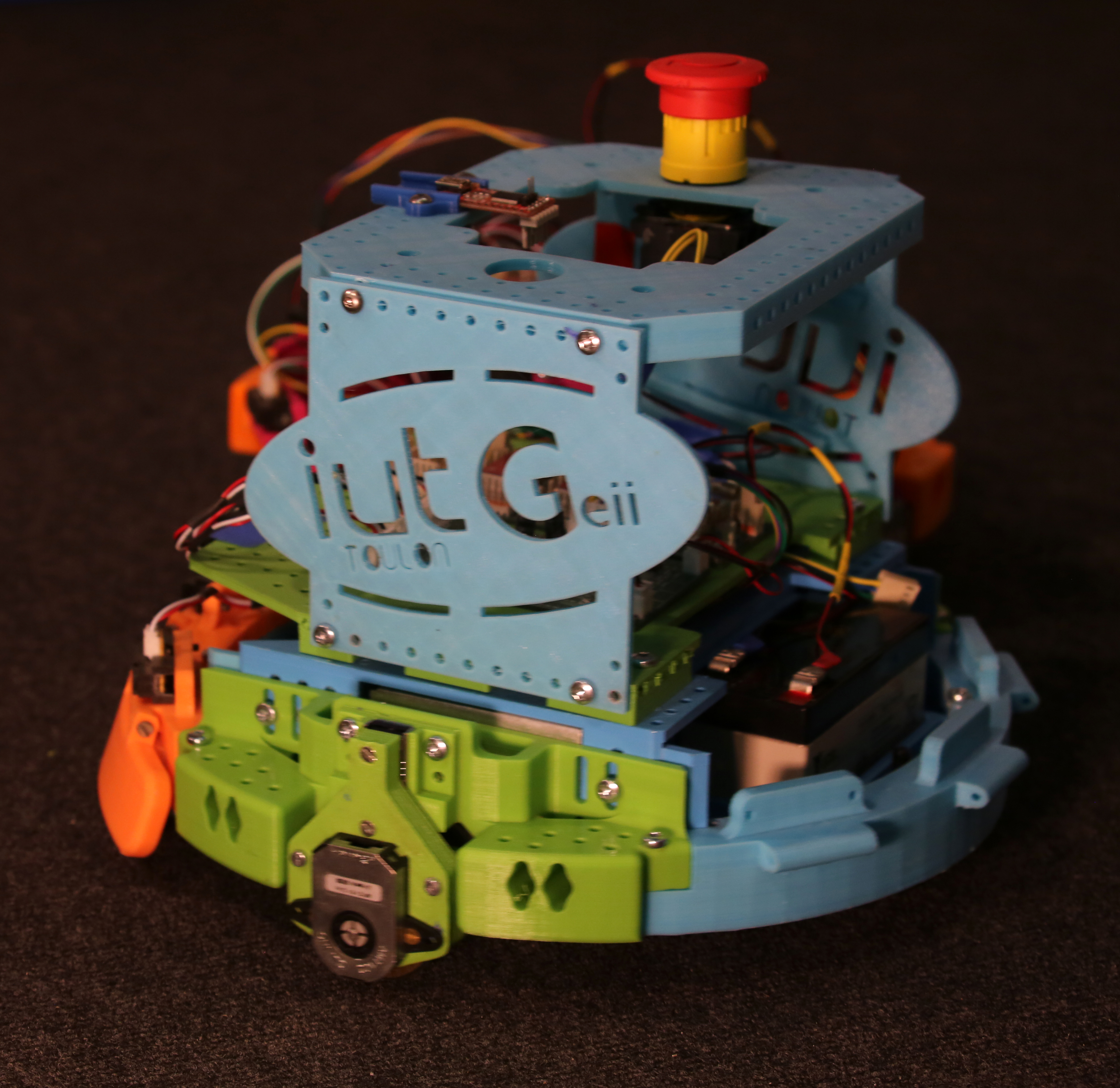
Robots en IUT – Conférence sur les enjeux de la robotique
Conférence sur les robots et les enjeux de la robotique en IUT : Télécharger la présentation Les robots en IUT GEII La robotique permet la mise en pratique des connaissances et compétences vues en DUT GEII, en les appliquant à la réalisation concrète de robots...
Capteurs et bus terrain en robotique
Ressources pour les capteurs et bus terrains en robotique