Ressources pour le SLAM :
- Page du Cognitive Lab de l’ENSTA sur les loop closure algotihms : http://cogrob.ensta-paris.fr/loopclosure.html
- Large-Scale Outdoor SLAM Based on 2D Lidar : papier MDPI https://www.mdpi.com/2079-9292/8/6/613/htm
- https://www.mrpt.org/tutorials/slam-algorithms/slam-simultaneous-localization-and-mapping-for-beginners-the-basics/
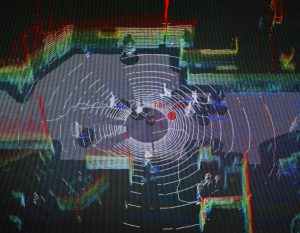
Après avoir traité de l’odométrie, de la trajectographie et de l’asservissement (voir l’article sur le positionnement et l’odométrie), et de l’interfaçage d’un télémètre laser à balayage de type RPLIDAR (voir l’article sur le LIDAR), nous nous proposons dans cet article de réunir les deux au sein d’un même projet afin de récupérer les cartes 2D de l’environnement du robot en temps réel grâce au microcontrôleur dsPIC, l’odométrie toujours grâce à ce microcontrôleur et de fusionner ces informations pour remplir une carte fixe de l’environnement dans laquelle évoluera le robot.
La réalisation de cette partie sera décrie dans le détail ultérieurement, en attendant voici les codes embarqué et en C# permettant d’effectuer cette localisation et cartographie simultanée. Il est à noter que le coût total du robot servant à ce projet avoisine les 500€, ce qui reste très limité pour une tâche assez complexe à effectuer en robotique.