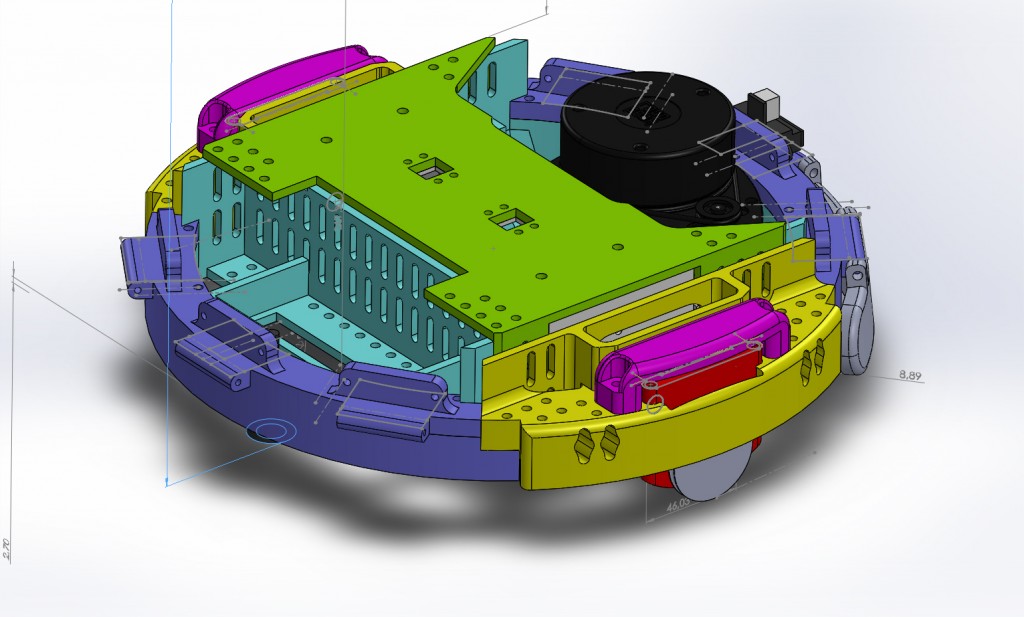
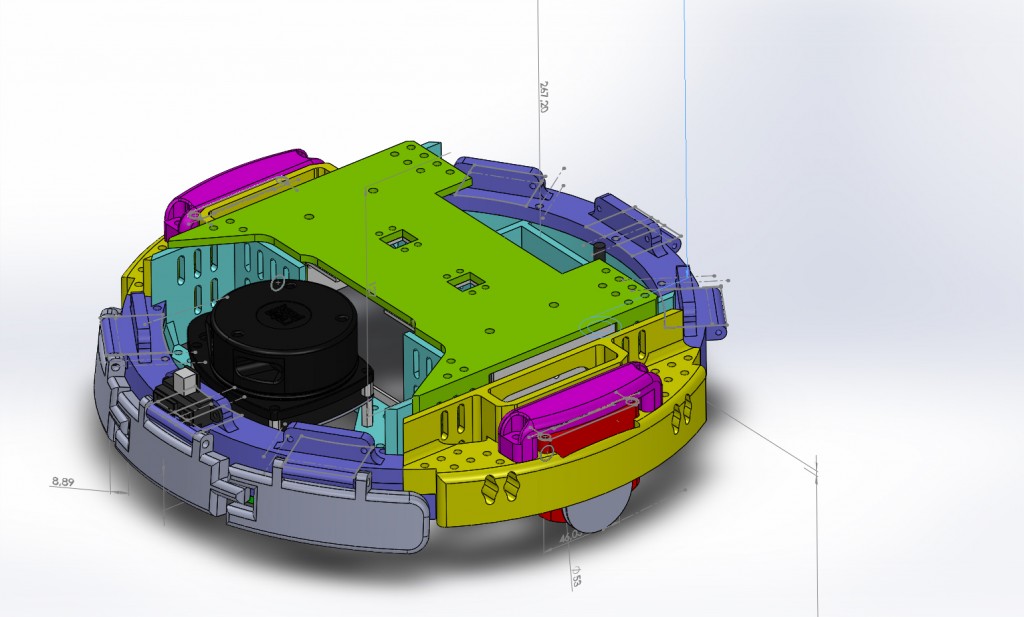
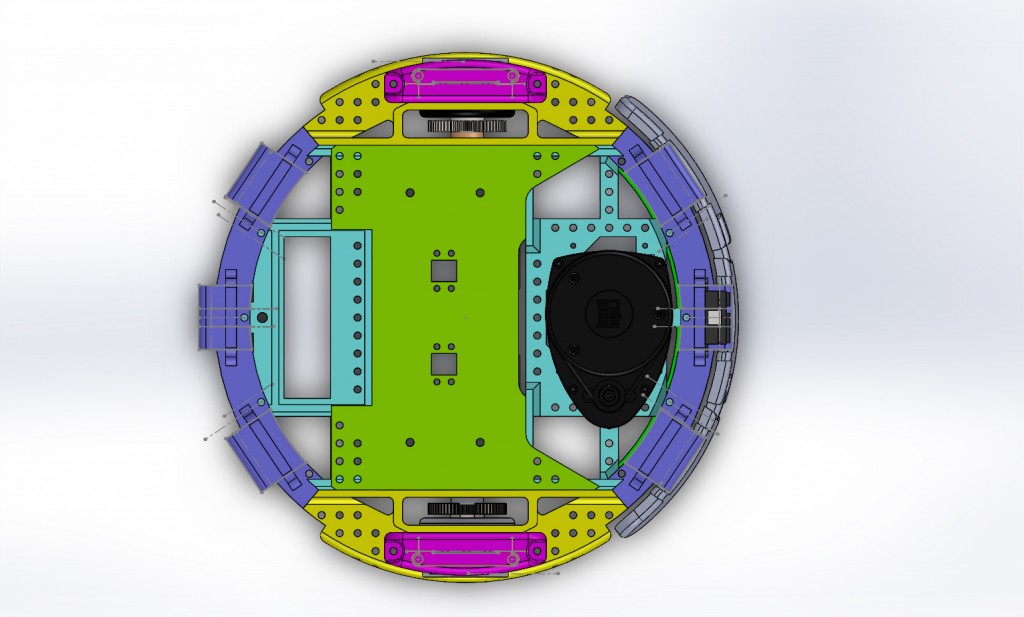
Afin d’aider les équipes à participer à la coupe de robotique des IUT, l’IUT GEII de Toulon met à disposition les fichiers .STL de ses pièces mécaniques permettant d’habiller les châssis des robots fournis par l’IUT de Cachan.
Cet habillage se compose de plusieurs parties, à assembler à l’aide de vis de 4mm principalement. Il permet de monter :
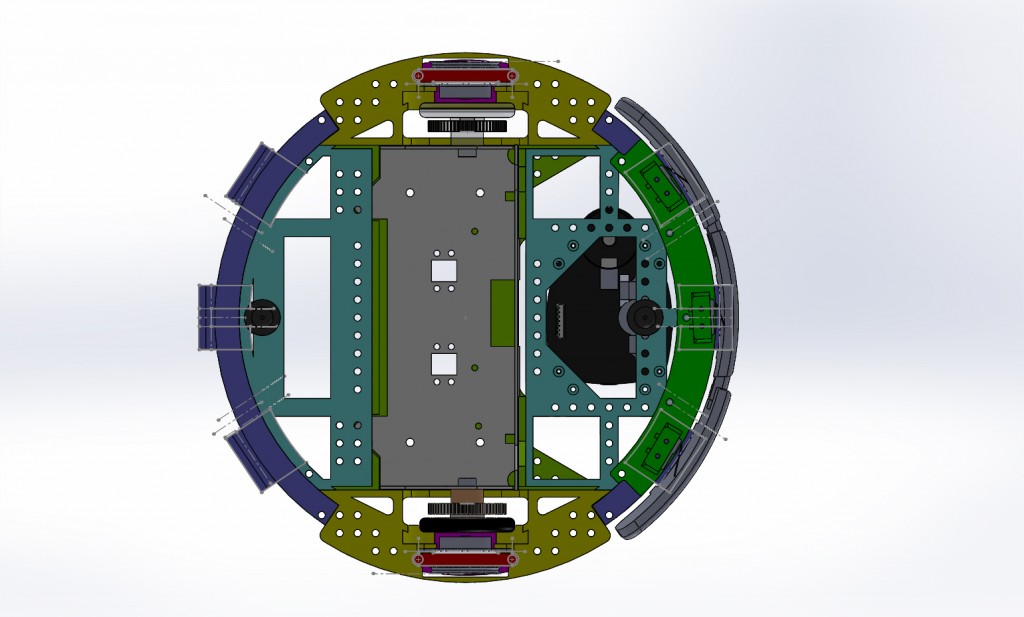
- des télémètres infrarouge (6 points de fixation prévus : trois devant, trois derrière) de type Sharp 2Y0A21YK0F ou équivalent (lien Digikey).
- des bumpers de détection de collision (3 à l’avant, 3 à l’arrière). Les switchs utilisés pour la détection des chocs sont les suivants : SS-5GL (lien Digikey). A noter que le sens d’insertion des switchs doit être respecté pour un fonctionnement optimal.
- un LIDAR de type RPLIDAR (Découvrir)
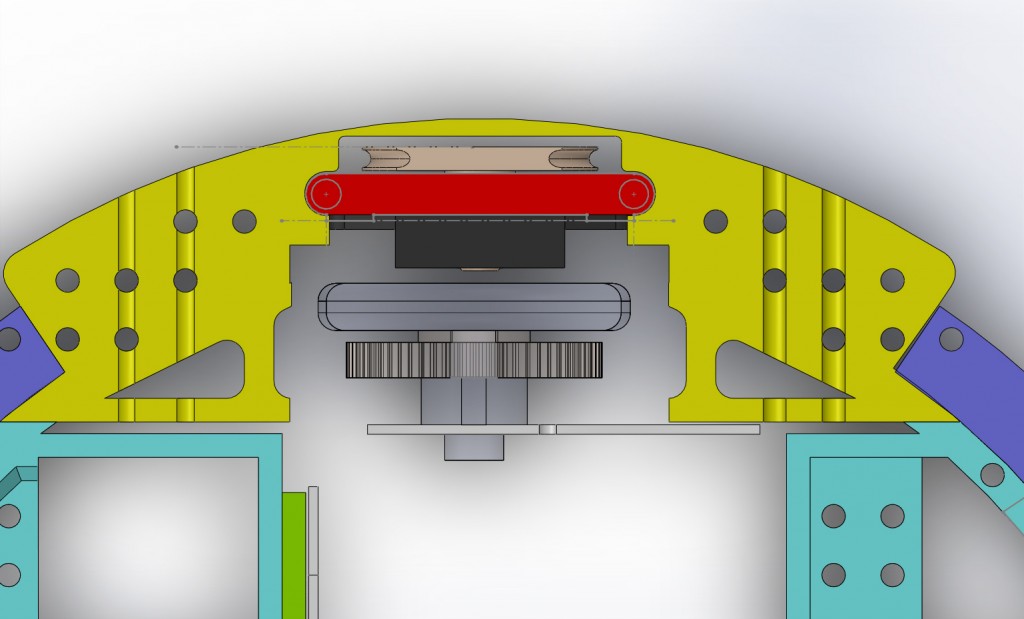
- Des odomètres montés sur roues codeuses libres. Le codeur est de type CUI AMT 102 (lien Digikey). Il est monté sur un support mobile (en rouge). Une roue codeuse (imprimée en 3D) et porteuse d’un joint torique est fixée sur ce support à l’aide d’un roulement de type roulement de roller de diamètre intérieur 8 mm, d’épaisseur 7 mm et de diamètre extérieur 22 mm. Le support mobile est en liaison glissière avec le pourtour chassis latéral, il est repoussé au sol par un ressort situé entre la traverse en rose et le support mobile en rouge. Ce ressort est facile à trouver : ressort de stylo.
- n’importe quel autre capteur ou actionneur : de nombreux trous sont percé avec un pas de 10 mm et au diamètre 4 mm un peu partout dans l’habillage du châssis.
- La batterie au plomb réglementaire.
Les fichiers Solidworks du robot dans son intégralité sont téléchargeables ici. Nous les avons imprimés à l’IUT GEII de Toulon sur une Ultimaker 2.
Les fichiers de réalisation de la balise infrarouge viendront bientôt !